十二年專注于步進(jìn)電機(jī)解決方案多年的技術(shù)應(yīng)用經(jīng)驗團(tuán)隊,精易求精的產(chǎn)品生產(chǎn)制造
全國咨詢熱線400-1755-808
信息來源于:互聯(lián)網(wǎng) 發(fā)布于:2024-12-12
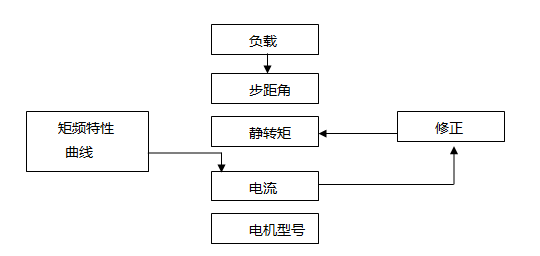
1、步距角的選擇
電機(jī)的步距角取決于負(fù)載精度的要求,將負(fù)載的最小分辨率(當(dāng)量)換算到電機(jī)軸上,每個當(dāng)量電機(jī)應(yīng)走多少角度(包括減速)。電機(jī)的步距角應(yīng)等于或小于此角度。市場上步進(jìn)電機(jī)的步距角一般有0.36度/0.72度(五相電機(jī))、0.9度/1.8度(二、四相電機(jī))、1.5度/3度 (三相電機(jī))等。
2、靜轉(zhuǎn)矩選擇:
步進(jìn)電機(jī)的動態(tài)力矩一下子很難確定,我們往往先確定電機(jī)的靜力矩。靜力矩選擇的依據(jù)是電機(jī)工作的負(fù)載,而負(fù)載可分為慣性負(fù)載和摩擦負(fù)載二種。單一的慣性負(fù)載和單一的摩擦負(fù)載是不存在的。直接起動時(一般由低速)時二種負(fù)載均要考慮,加速起動時主要考慮慣性負(fù)載,恒速運行進(jìn)只要考慮摩擦負(fù)載。一般情況下,靜力矩應(yīng)為摩擦負(fù)載的2-3倍內(nèi)好,靜力矩一旦選定,電機(jī)的機(jī)座及長度便能確定下來(幾何尺寸)。
3、電機(jī)機(jī)座號選擇
步進(jìn)電機(jī)轉(zhuǎn)矩的選擇步進(jìn)電機(jī)的保持轉(zhuǎn)矩,近似于傳統(tǒng)電機(jī)所稱的“功率”。當(dāng)然,有著本質(zhì)的區(qū)別。步進(jìn)電動機(jī)的物理結(jié)構(gòu),完全不同于交流、直流電機(jī),電機(jī)的輸出功率是可變的。通常根據(jù)需要的轉(zhuǎn)矩大小(即所要帶動物體的扭力大小),來選擇哪種型號的電機(jī)。大致說來,扭力在0.8N.m以下,選擇20、28、35、39、42(電機(jī)的機(jī)身直徑或方度,單位:mm);扭力在1N.m左右的,選擇57電機(jī)較為合適。扭力在幾個N.m或更大的情況下,就要選擇86、110、130等規(guī)格的步進(jìn)。
4、電流
靜力矩一樣的電機(jī),由于電流參數(shù)不同,其運行特性差別很大,可依據(jù)矩頻特性曲線圖,判斷電機(jī)的電流。